publications
preprints
2025
-
 pacSTL: PAC-Bounded Signal Temporal Logic from Data-Driven Reachability AnalysisElizabeth Dietrich*, Hanna Krasowski*, Emir Cem Gezer, and 3 more authors2025
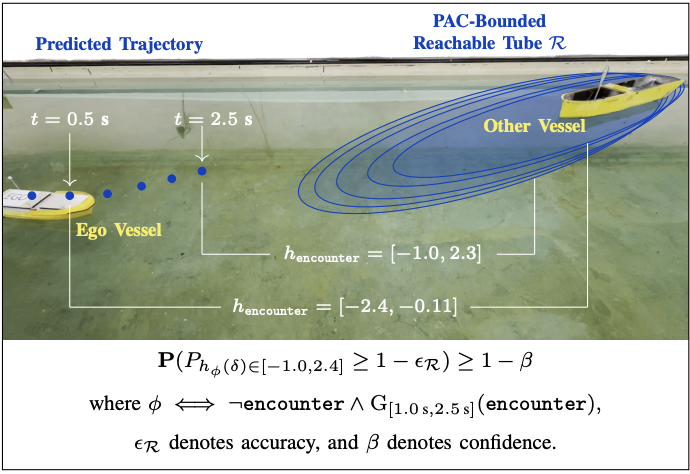
pacSTL: PAC-Bounded Signal Temporal Logic from Data-Driven Reachability AnalysisElizabeth Dietrich*, Hanna Krasowski*, Emir Cem Gezer, and 3 more authors2025Real-world robotic systems must comply with safety requirements in the presence of uncertainty. To define and measure requirement adherence, Signal Temporal Logic (STL) offers a mathematically rigorous and expressive language. However, standard STL cannot account for uncertainty. We address this problem by presenting pacSTL, a framework that combines Probably Approximately Correct (PAC) bounded set predictions with an interval-extension of STL through optimization problems on the atomic proposition level. pacSTL provides PAC-bounded robustness intervals on the specification level that can be utilized in monitoring. We demonstrate the effectiveness of this approach through maritime navigation and analyze the efficiency and scalability of pacSTL through simulation and real-world experimentation on model vessels.

published
2025
-
 Data-Driven Reachability with Scenario Optimization and the Holdout MethodElizabeth Dietrich, Rosalyn Devonport, Stephen Tu, and 1 more authorIn 2025 IEEE 64th Conference on Decision and Control (CDC), 2025
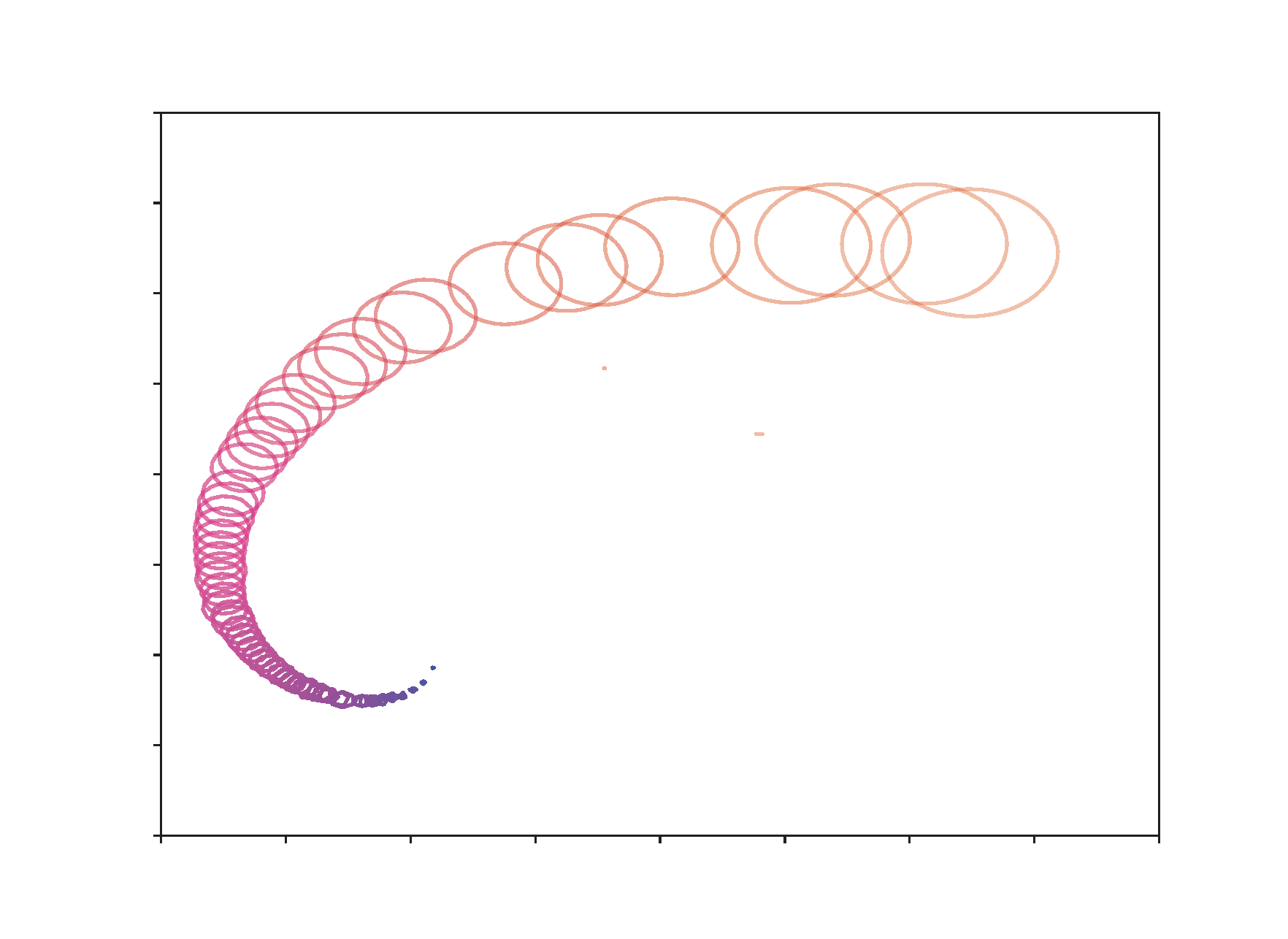
Data-Driven Reachability with Scenario Optimization and the Holdout MethodElizabeth Dietrich, Rosalyn Devonport, Stephen Tu, and 1 more authorIn 2025 IEEE 64th Conference on Decision and Control (CDC), 2025Reachability analysis is an important method in providing safety guarantees for systems with unknown or uncertain dynamics. Due to the computational intractability of exact reachability analysis for general nonlinear, high-dimensional systems, recent work has focused on the use of probabilistic methods for computing approximate reachable sets. In this work, we advocate for the use of a general purpose, practical, and sharp method for data-driven reachability: the holdout method. Despite the simplicity of the holdout method, we show—on several numerical examples including scenario-based reach tubes—that the resulting probabilistic bounds are substantially sharper and require fewer samples than existing methods for data-driven reachability. Furthermore, we complement our work with a discussion on the necessity of probabilistic reachability bounds. We argue that any method that attempts to de-randomize the bounds, by converting the guarantees to hold deterministically, requires (a) an exponential in state-dimension amount of samples to achieve non-vacuous guarantees, and (b) extra assumptions on the dynamics.
@inproceedings{Dietrich2025_a, author = {Dietrich, Elizabeth and Devonport, Rosalyn and Tu, Stephen and Arcak, Murat}, booktitle = {2025 IEEE 64th Conference on Decision and Control (CDC)}, title = {Data-Driven Reachability with Scenario Optimization and the Holdout Method}, year = {2025}, volume = {}, number = {}, pages = {3925-3931}, keywords = {Probabilistic logic;Safety;Computational efficiency;Complexity theory;Reachability analysis;Optimization}, url = {https://ieeexplore.ieee.org/document/11312065} } -
 Symbolic Control for Autonomous Docking of Marine Surface VesselsElizabeth Dietrich*, Emir Cem Gezer*, Bingzhuo Zhong, and 4 more authorsIn 2025 IEEE 64th Conference on Decision and Control (CDC), 2025
Symbolic Control for Autonomous Docking of Marine Surface VesselsElizabeth Dietrich*, Emir Cem Gezer*, Bingzhuo Zhong, and 4 more authorsIn 2025 IEEE 64th Conference on Decision and Control (CDC), 2025Docking marine surface vessels remains a largely manual task due to its safety-critical nature. In this paper, we develop a hierarchical symbolic control architecture for autonomous docking maneuvers of a dynamic positioning vessel, to provide formal safety guarantees. At the upper-level, we treat the vessel’s desired surge, sway, and yaw velocities as control inputs and synthesize a symbolic controller in real-time. The desired velocities are then transmitted to and executed by the vessel’s low-level velocity feedback control loop. Given a synthesized symbolic controller, we investigate methods to optimize the performance of the proposed control scheme for the docking task. The efficacy of this methodology is evaluated on a low-fidelity simulation model of a marine surface vessel in the presence of static and dynamic obstacles and, for the first time, through physical experiments on a scaled model vessel.
@inproceedings{Dietrich2025_b, author = {Dietrich, Elizabeth and Gezer, Emir Cem and Zhong, Bingzhuo and Arcak, Murat and Zamani, Majid and Skjetne, Roger and Sørensen, Asgeir Johan}, booktitle = {2025 IEEE 64th Conference on Decision and Control (CDC)}, title = {Symbolic Control for Autonomous Docking of Marine Surface Vessels}, year = {2025}, volume = {}, number = {}, pages = {3021-3026}, keywords = {Computational modeling;Graphics processing units;Computer architecture;Parallel processing;Real-time systems;Safety;Feedback control;Surges}, url = {https://ieeexplore.ieee.org/document/11312758} }


2024
-
 Nonconvex scenario optimization for data-driven reachabilityElizabeth Dietrich, Alex Devonport, and Murat ArcakIn Proceedings of the 6th Annual Learning for Dynamics & Control Conference, 2024
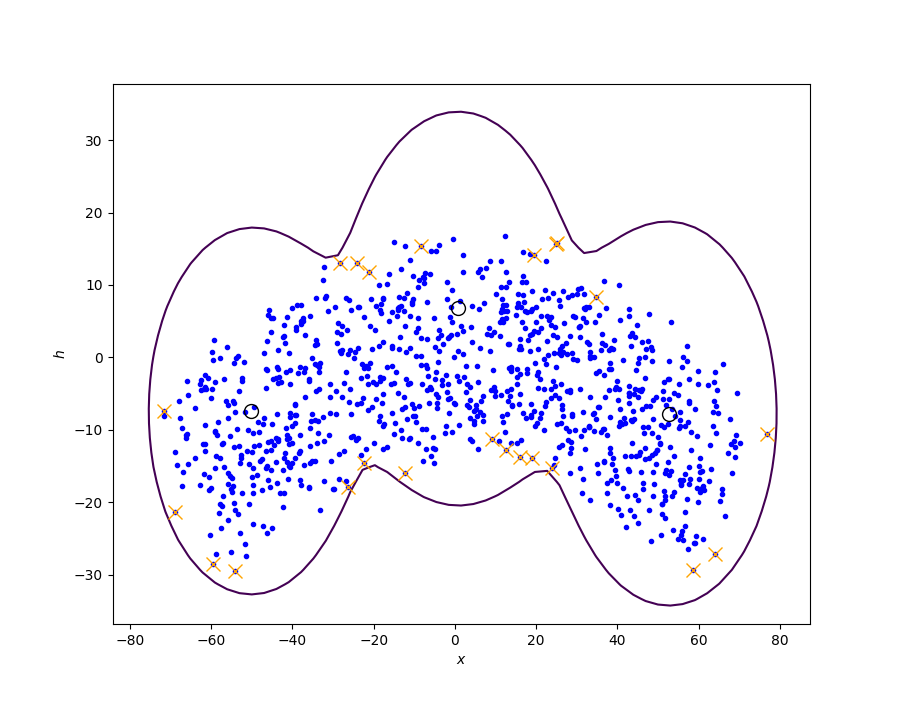
Nonconvex scenario optimization for data-driven reachabilityElizabeth Dietrich, Alex Devonport, and Murat ArcakIn Proceedings of the 6th Annual Learning for Dynamics & Control Conference, 2024Many of the popular reachability analysis methods rely on the existence of system models. When system dynamics are uncertain or unknown, data-driven techniques must be utilized instead. In this paper, we propose an approach to data-driven reachability that provides a probabilistic guarantee of correctness for these systems through nonconvex scenario optimization. We pose the problem of finding reachable sets directly from data as a chance-constrained optimization problem, and present two algorithms for estimating nonconvex reachable sets: (1) through the union of partition cells and (2) through the sum of radial basis functions. Additionally, we investigate numerical examples to demonstrate the capability and applicability of the introduced methods to provide nonconvex reachable set approximations.
@inproceedings{Dietrich2024, title = {Nonconvex scenario optimization for data-driven reachability}, author = {Dietrich, Elizabeth and Devonport, Alex and Arcak, Murat}, booktitle = {Proceedings of the 6th Annual Learning for Dynamics & Control Conference}, year = {2024}, url = {https://proceedings.mlr.press/v242/dietrich24a.html} }

* indicates equal contribution