publications
* indicates equal contribution
preprints
2026
-
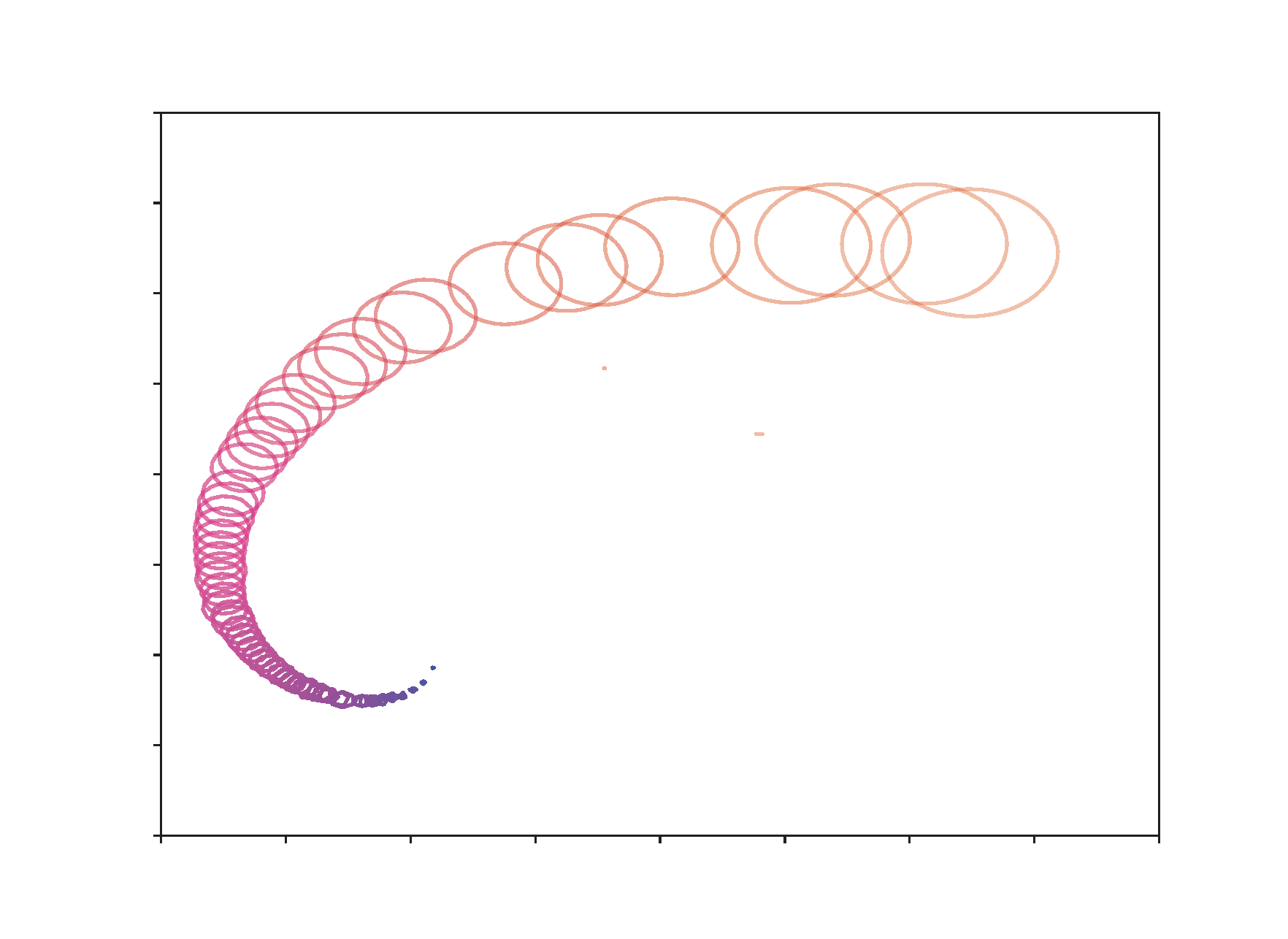
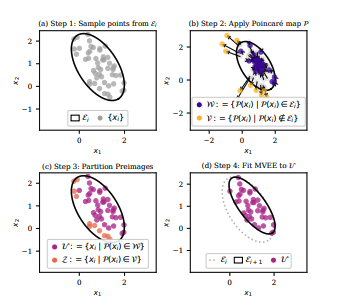 Finite-Step Invariant Sets for Hybrid Systems with Probabilistic GuaranteesVarun Madabushi*, Elizabeth Dietrich*, Hanna Krasowski, and 1 more author2026
Finite-Step Invariant Sets for Hybrid Systems with Probabilistic GuaranteesVarun Madabushi*, Elizabeth Dietrich*, Hanna Krasowski, and 1 more author2026Poincare return maps are a fundamental tool for analyzing periodic orbits in hybrid dynamical systems, including legged locomotion, power electronics, and other cyber-physical systems with switching behavior. The Poincare return map captures the evolution of the hybrid system on a guard surface, reducing the stability analysis of a periodic orbit to that of a discrete-time system. While linearization provides local stability information, assessing robustness to disturbances requires identifying invariant sets of the state space under the return dynamics. However, computing such invariant sets is computationally difficult, especially when system dynamics are only available through forward simulation. In this work, we propose an algorithmic framework leveraging sampling-based optimization to compute a finite-step invariant ellipsoid around a nominal periodic orbit using sampled evaluations of the return map. The resulting solution is accompanied by probabilistic guarantees on finite-step invariance satisfying a user-defined accuracy threshold. We demonstrate the approach on two low-dimensional systems and a compass-gait walking model.

published
2026
-
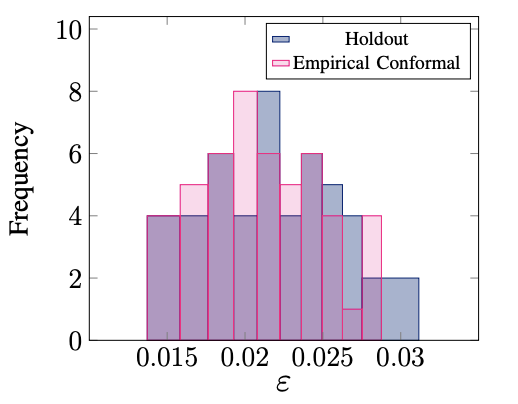 Probably Approximately Correct (PAC) Guarantees for Data-Driven Reachability Analysis: A Theoretical and Empirical ComparisonElizabeth Dietrich*, Hanna Krasowski*, and Murat ArcakIn Accepted for Proc. of the IEEE Conference on Decision and Control (CDC), 2026
Probably Approximately Correct (PAC) Guarantees for Data-Driven Reachability Analysis: A Theoretical and Empirical ComparisonElizabeth Dietrich*, Hanna Krasowski*, and Murat ArcakIn Accepted for Proc. of the IEEE Conference on Decision and Control (CDC), 2026Reachability analysis evaluates system safety, by identifying the set of states a system may evolve within over a finite time horizon. In contrast to model-based reachability analysis, data-driven reachability analysis estimates reachable sets and derives probabilistic guarantees directly from data. Several popular techniques for validating reachable sets – conformal prediction, scenario optimization, and the holdout method – admit similar Probably Approximately Correct (PAC) guarantees. We establish a formal connection between these PAC bounds and present an empirical case study on reachable sets to illustrate the computational and sample trade-offs associated with these methods. We argue that despite the formal relationship between these techniques, subtle differences arise in both the interpretation of guarantees and the parameterization. As a result, these methods are not generally interchangeable. We conclude with practical advice on the usage of these methods.
-
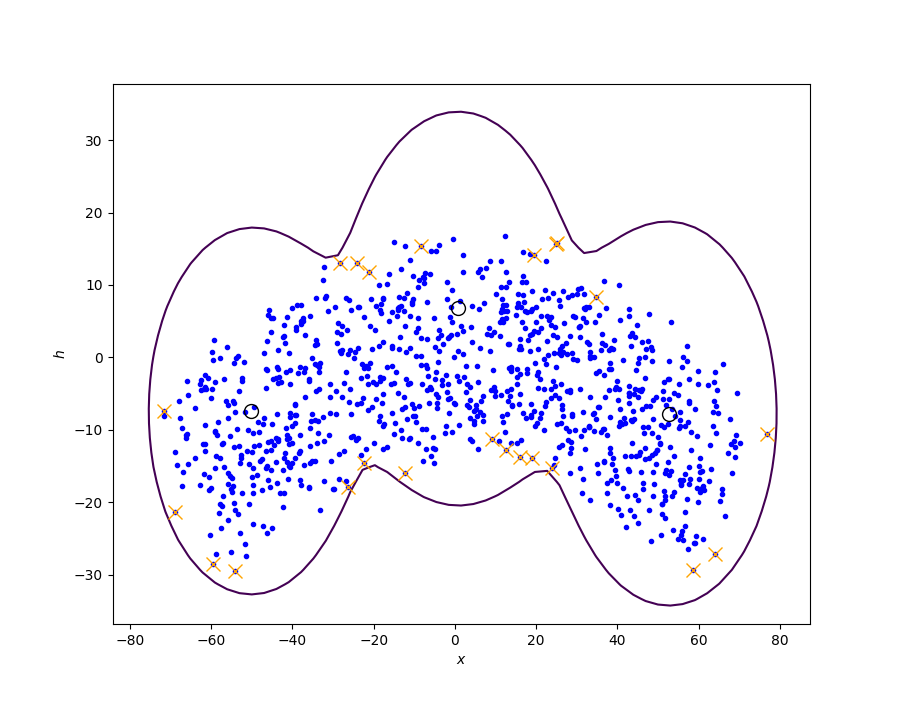
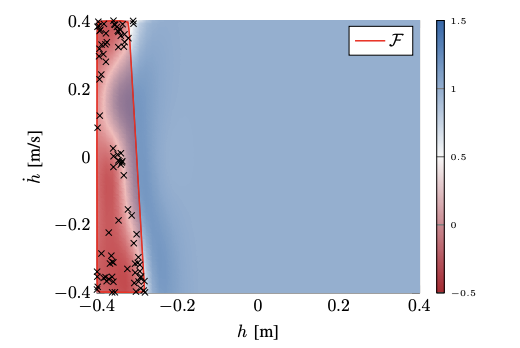 Importance Sampling for Statistical Certification of Viable Initial SetsElizabeth Dietrich, Hanna Krasowski, Vegard Flovik, and 1 more authorIn Accepted for Proc. of the IEEE Conference on Decision and Control (CDC), 2026
Importance Sampling for Statistical Certification of Viable Initial SetsElizabeth Dietrich, Hanna Krasowski, Vegard Flovik, and 1 more authorIn Accepted for Proc. of the IEEE Conference on Decision and Control (CDC), 2026We study the problem of statistically certifying viable initial sets (VISs) – sets of initial conditions whose trajectories satisfy a given control specification. While VISs can be obtained from model-based methods, these methods typically rely on simplified models. We propose a simulation-based framework to certify VISs by estimating the probability of specification violations under a high-fidelity or black-box model. Since detecting these violations may be challenging due to their scarcity, we propose a sample-efficient framework that leverages importance sampling to target high-risk regions. We derive an empirical Bernstein inequality for weighted random variables, enabling finite-sample guarantees for importance sampling estimators. We demonstrate the effectiveness of the proposed approach on two systems and show improved convergence of the resulting bounds on an Adaptive Cruise Control benchmark.
-
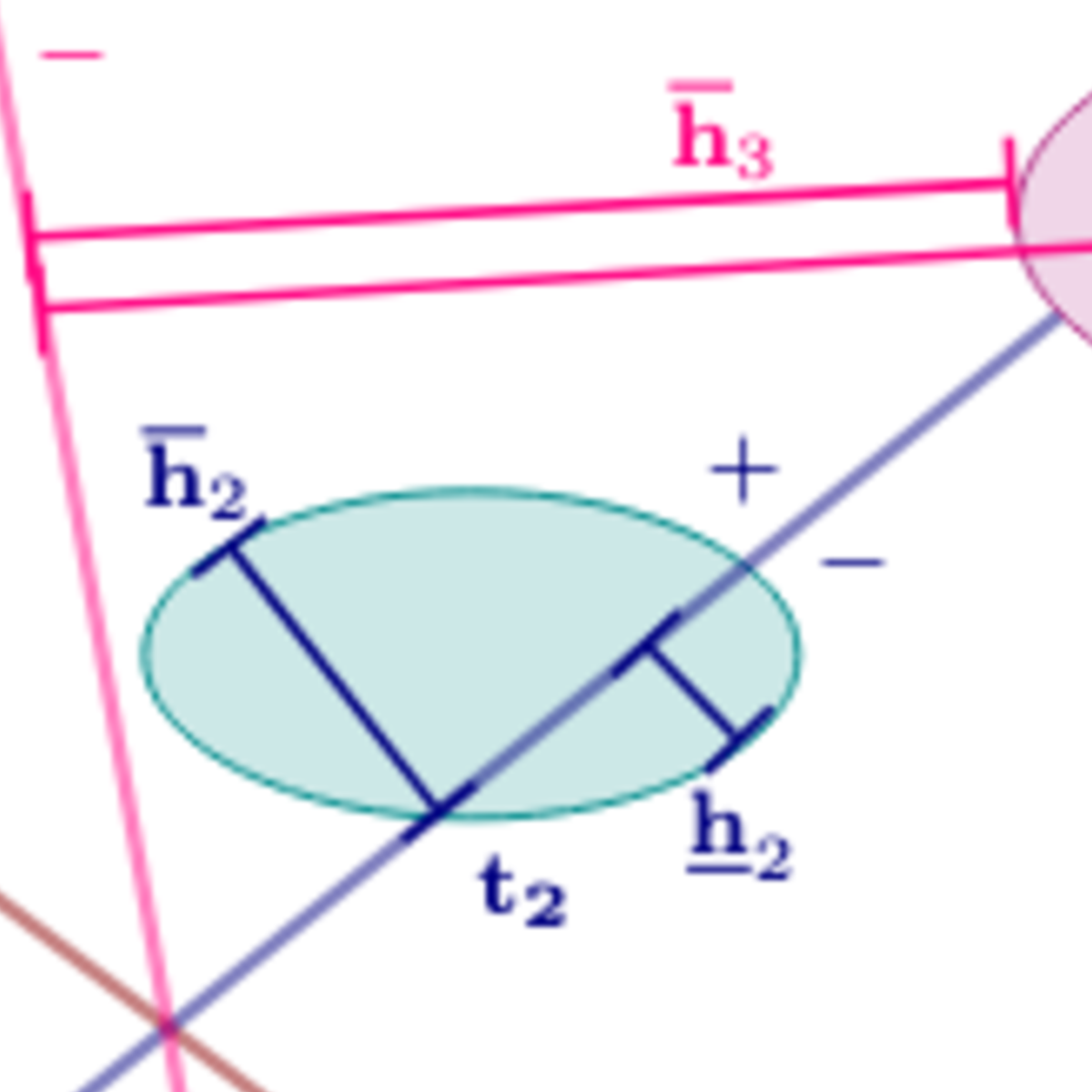 pacSTL: PAC-Bounded Signal Temporal Logic from Data-Driven Reachability AnalysisHanna Krasowski*, Elizabeth Dietrich*, Emir Cem Gezer, and 3 more authorsIEEE Control Systems Letters, 2026
pacSTL: PAC-Bounded Signal Temporal Logic from Data-Driven Reachability AnalysisHanna Krasowski*, Elizabeth Dietrich*, Emir Cem Gezer, and 3 more authorsIEEE Control Systems Letters, 2026Signal Temporal Logic (STL) is an expressive language for specifying behaviors of dynamical systems from continuous signals. However, a limitation of standard STL is its inherently deterministic semantics, which prevents it from accommodating uncertainty. Existing approaches to overcome this limitation are computationally costly and limit real-time capability, requiring repeated trajectory sampling or redesign of probability distributions over atomic propositions whenever the atomic propositions or specifications change. We introduce pacSTL, a framework that combines Probably Approximately Correct (PAC)-bounded reachable set predictions with an interval extension of STL. pacSTL computes lower and upper bounds on atomic robustness values by solving optimization problems over PAC-bounded reachable sets and propagates the bounds through the temporal logic operators. The resulting evaluation yields a PAC-bounded robustness interval at the specification level. We demonstrate the efficiency and relevance of pacSTL by verifying a quadrotor flight scenario and runtime monitoring a maritime navigation encounter.
@article{Dietrich2026a, author = {Krasowski, Hanna and Dietrich, Elizabeth and Gezer, Emir Cem and Skjetne, Roger and Sørensen, Asgeir Johan and Arcak, Murat}, journal = {IEEE Control Systems Letters}, title = {pacSTL: PAC-Bounded Signal Temporal Logic from Data-Driven Reachability Analysis}, year = {2026}, pages = {1-1}, url = {https://ieeexplore.ieee.org/document/11615301} }



2025
-
 Data-Driven Reachability with Scenario Optimization and the Holdout MethodElizabeth Dietrich, Rosalyn Devonport, Stephen Tu, and 1 more authorIn Proc. of the 2025 IEEE 64th Conference on Decision and Control (CDC), 2025
Data-Driven Reachability with Scenario Optimization and the Holdout MethodElizabeth Dietrich, Rosalyn Devonport, Stephen Tu, and 1 more authorIn Proc. of the 2025 IEEE 64th Conference on Decision and Control (CDC), 2025Reachability analysis is an important method in providing safety guarantees for systems with unknown or uncertain dynamics. Due to the computational intractability of exact reachability analysis for general nonlinear, high-dimensional systems, recent work has focused on the use of probabilistic methods for computing approximate reachable sets. In this work, we advocate for the use of a general purpose, practical, and sharp method for data-driven reachability: the holdout method. Despite the simplicity of the holdout method, we show—on several numerical examples including scenario-based reach tubes—that the resulting probabilistic bounds are substantially sharper and require fewer samples than existing methods for data-driven reachability. Furthermore, we complement our work with a discussion on the necessity of probabilistic reachability bounds. We argue that any method that attempts to de-randomize the bounds, by converting the guarantees to hold deterministically, requires (a) an exponential in state-dimension amount of samples to achieve non-vacuous guarantees, and (b) extra assumptions on the dynamics.
@inproceedings{Dietrich2025_a, author = {Dietrich, Elizabeth and Devonport, Rosalyn and Tu, Stephen and Arcak, Murat}, booktitle = {Proc. of the 2025 IEEE 64th Conference on Decision and Control (CDC)}, title = {Data-Driven Reachability with Scenario Optimization and the Holdout Method}, year = {2025}, pages = {3925-3931}, url = {https://ieeexplore.ieee.org/document/11312065} } -
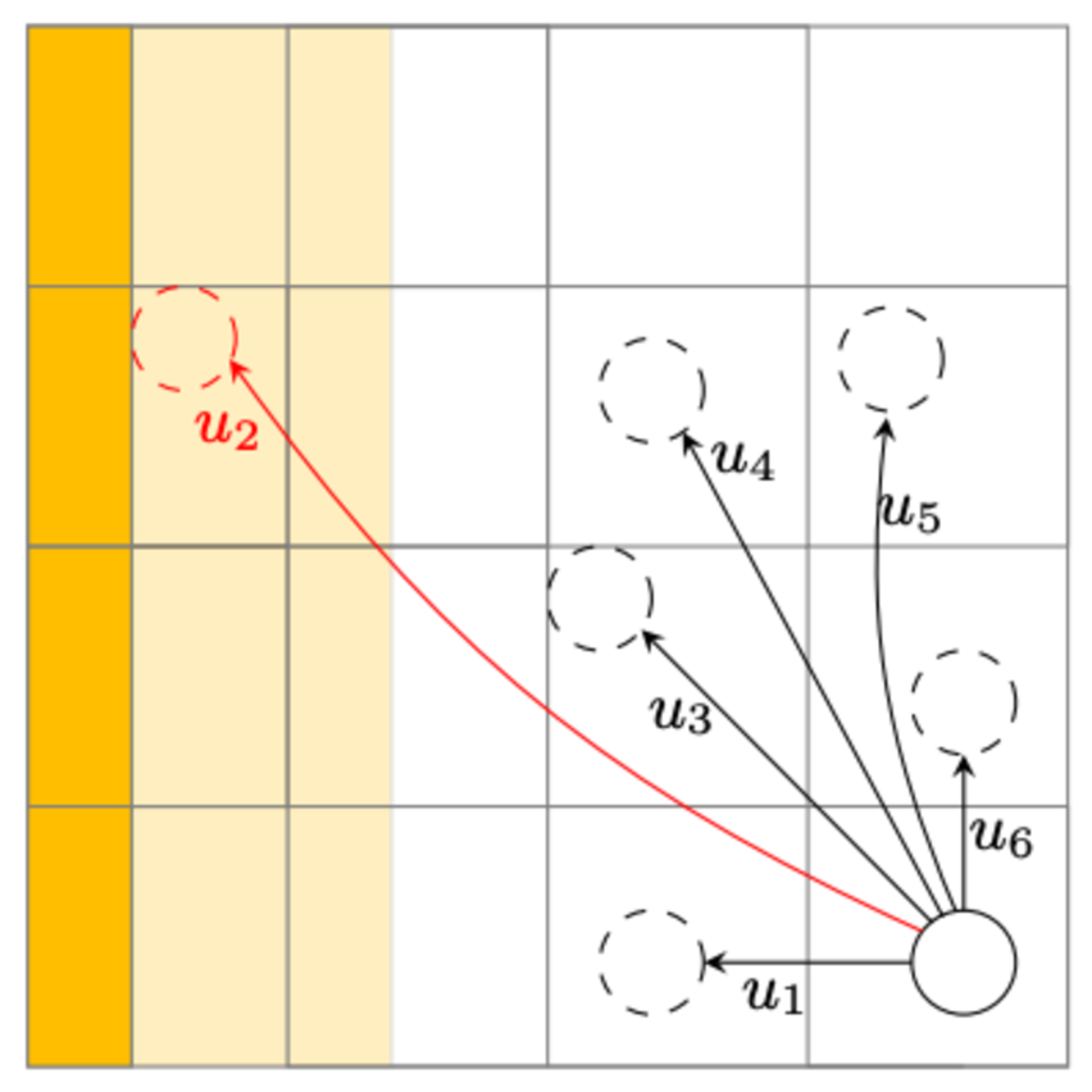 Symbolic Control for Autonomous Docking of Marine Surface VesselsElizabeth Dietrich*, Emir Cem Gezer*, Bingzhuo Zhong, and 4 more authorsIn Proc. of the 2025 IEEE 64th Conference on Decision and Control (CDC), 2025
Symbolic Control for Autonomous Docking of Marine Surface VesselsElizabeth Dietrich*, Emir Cem Gezer*, Bingzhuo Zhong, and 4 more authorsIn Proc. of the 2025 IEEE 64th Conference on Decision and Control (CDC), 2025Docking marine surface vessels remains a largely manual task due to its safety-critical nature. In this paper, we develop a hierarchical symbolic control architecture for autonomous docking maneuvers of a dynamic positioning vessel, to provide formal safety guarantees. At the upper-level, we treat the vessel’s desired surge, sway, and yaw velocities as control inputs and synthesize a symbolic controller in real-time. The desired velocities are then transmitted to and executed by the vessel’s low-level velocity feedback control loop. Given a synthesized symbolic controller, we investigate methods to optimize the performance of the proposed control scheme for the docking task. The efficacy of this methodology is evaluated on a low-fidelity simulation model of a marine surface vessel in the presence of static and dynamic obstacles and, for the first time, through physical experiments on a scaled model vessel.
@inproceedings{Dietrich2025_b, author = {Dietrich, Elizabeth and Gezer, Emir Cem and Zhong, Bingzhuo and Arcak, Murat and Zamani, Majid and Skjetne, Roger and Sørensen, Asgeir Johan}, booktitle = {Proc. of the 2025 IEEE 64th Conference on Decision and Control (CDC)}, title = {Symbolic Control for Autonomous Docking of Marine Surface Vessels}, year = {2025}, pages = {3021-3026}, url = {https://ieeexplore.ieee.org/document/11312758} }


2024
-
 Nonconvex scenario optimization for data-driven reachabilityElizabeth Dietrich, Alex Devonport, and Murat ArcakIn Proceedings of the 6th Annual Learning for Dynamics & Control Conference, 2024
Nonconvex scenario optimization for data-driven reachabilityElizabeth Dietrich, Alex Devonport, and Murat ArcakIn Proceedings of the 6th Annual Learning for Dynamics & Control Conference, 2024Many of the popular reachability analysis methods rely on the existence of system models. When system dynamics are uncertain or unknown, data-driven techniques must be utilized instead. In this paper, we propose an approach to data-driven reachability that provides a probabilistic guarantee of correctness for these systems through nonconvex scenario optimization. We pose the problem of finding reachable sets directly from data as a chance-constrained optimization problem, and present two algorithms for estimating nonconvex reachable sets: (1) through the union of partition cells and (2) through the sum of radial basis functions. Additionally, we investigate numerical examples to demonstrate the capability and applicability of the introduced methods to provide nonconvex reachable set approximations.
@inproceedings{Dietrich2024, title = {Nonconvex scenario optimization for data-driven reachability}, author = {Dietrich, Elizabeth and Devonport, Alex and Arcak, Murat}, booktitle = {Proceedings of the 6th Annual Learning for Dynamics & Control Conference}, year = {2024}, url = {https://proceedings.mlr.press/v242/dietrich24a.html} }
